篇首语:本文由编程笔记#小编为大家整理,主要介绍了基于STM32+华为云IOT设计的智能防盗单车锁相关的知识,希望对你有一定的参考价值。
近年来随着国民经济的发展,交通拥堵和环境污染问题越来越突出,而自行车对改善交通与环境起到了重要作用。中国本身是一个自行车使用大国,随着自行车的发展,自行车的科技含量越来越高,然而自行车安防问题突出。目前市场上自行车锁大多是传统机械结构车锁,没有实现智能化,急需解决。本文提出一种基于STM32单片机的智能自行车锁(马蹄锁)的设计方法,来提高自行车锁的智能化及安防等级。
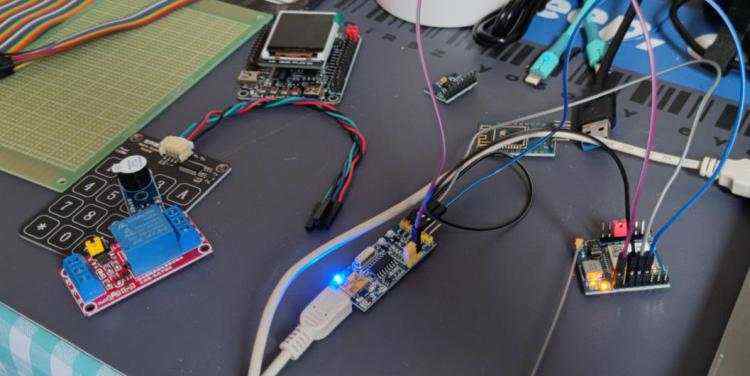
硬件选项说明:单片机采用STM32F103RCT6,GSM模块采用SIM800C,完成网络连接、数据上传,GPS经纬度解析,短信发送,物联网平台采用华为云IOT,作为数据存储端,蓝牙模块采用正点原子低功耗BLE蓝牙,支持蓝牙开锁解锁,车辆的状态使用ADXL345三轴加速度传感器检测,密码键盘采用电容矩阵键盘。
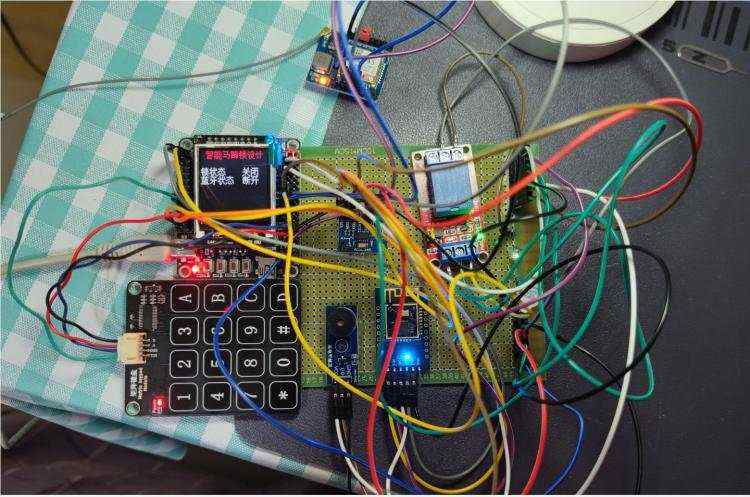

需要设计一款android手机APP,可以远程开锁解锁,手机APP对接华为云物联网平台,实现远程与自行车锁完成数据交互,命令下发。智能锁与华为云IOT服务器之间的通信协议采用MQTT协议,手机APP与华为云IOT服务器之间采用HTTP协议。智能锁除了支持远程开锁关锁之外,还支持蓝牙解锁和输入密码开始,设计的APP支持蓝牙功能,可以连接智能锁上的蓝牙完成开锁和关锁,如果没有带手机,可以输入密码完成开锁。
车辆的状态检测通过ADXL345三轴加速度计检测,如果车辆处于锁定状态,发现车辆被移动了会触发报警,锁里的蜂鸣器会持续响,并且SIM800C会向指定的手机号码发送短信,提示车辆可能被盗,同时上传GPS经纬度到云端服务器,手机APP上可以获取智能锁上传的GPS经纬度,调用百度地图显示车辆的位置,方便寻车。
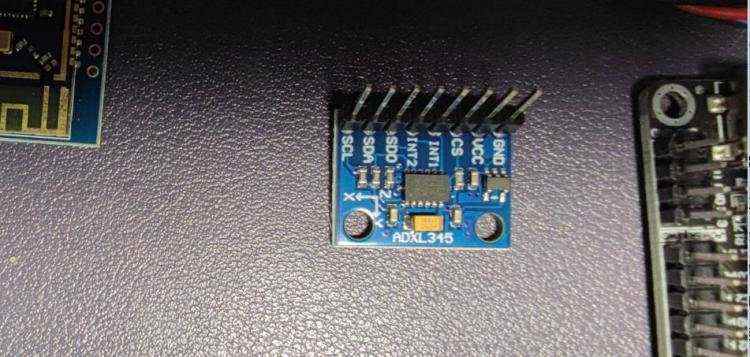
ADXL345是一款小尺寸、薄型、低功耗、完整的三轴加速度计,提供经过信号调理的电压输出。
说明:CS接高电平则选择IIC通信,反之则SPI通信。SDO(地址引脚)接高电平,根据手册器件的7位I2C地址是0x1D,后面跟上读取/写位(R/W),则写寄存器为0x3A,读寄存器为0x3B;接低电平,则7位I2C地址是0x53,同理,跟上读写标志位后写寄存器为0xA6,读寄存器为0xA7;


STM32F103RCT6的芯体规格是32位,速度是72MHz,程序存储器容量是256KB,程序存储器类型是FLASH,RAM容量是48K。


模块特点:
1、支持极限DC5V-18V宽电压输入
2、有电源使能开关引脚EN
3、支持锂电池供电接口VBAT3.5-4.5V
4、输入支持移动和联通手机卡Micro SIM卡
5、送51/STM32/ARDUINO驱动例程
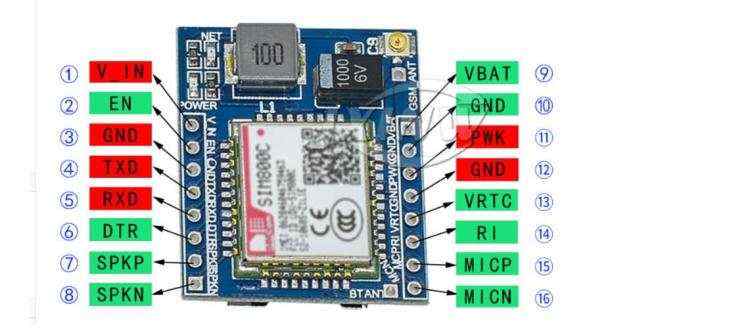
1、DC 5V-18V电源输入,推荐使用DC 9V
2、电源开始使能引脚默认使能
3、电源地
4、GSM模块的TXD引脚接其它模块的RXD
5、GSM模块的RXD引脚接其它模块的TXD
6、数据终端准备
7、内核音频输出引脚
8、内核音频输出引脚
9、锂电池输入引脚,DC 3.5 - 4.5V
10、电源地
11、启动引脚和GND短路可实现开机自启动
12、电源地
13、RTC外置电池引脚
14、内核振铃提示引脚
15、内合音频输入引脚
16、内核音频输入引脚
加粗的引脚一般都用到。

建议使用V_IN单独供电DC5-18V输入(推荐使用9V),或者VBAT供电锂电池两种供电方式这两种供电方式最稳定。如果只是简单调试,也可使用USB-TTL或者开发板的5V直接给模块供电。不过一般电脑或者开发板的功率有限,可能会不稳定。请根据具体情况自己取舍选择合适电源。
上位机与设备之间支持通过BLE低功耗串口蓝牙进行通信,支持通过网络连接华为云服务器进行通信,手机APP下发open_lock和close_lock实现关锁开锁。
上位机软件采用Qt框架设计,Qt是一个跨平台的C++图形用户界面应用程序框架。Qt是一个1991年由Qt Company开发的跨平台C++图形用户界面应用程序开发框架。它既可以开发GUI程序,也可用于开发非GUI程序,比如控制台工具和服务器。简单来说,QT可以很轻松的帮你做带界面的软件,甚至不需要你投入很大精力。
QT官网: https://www.qt.io/

QT学习入门实战专栏文章: https://blog.csdn.net/xiaolong1126626497/category_11400392.html
QT5.12.6的下载地址:
https://download.qt.io/archive/qt/5.12/5.12.6/
登录官网: https://www.huaweicloud.com/product/iothub.html
直接搜索物联网,打开页面。


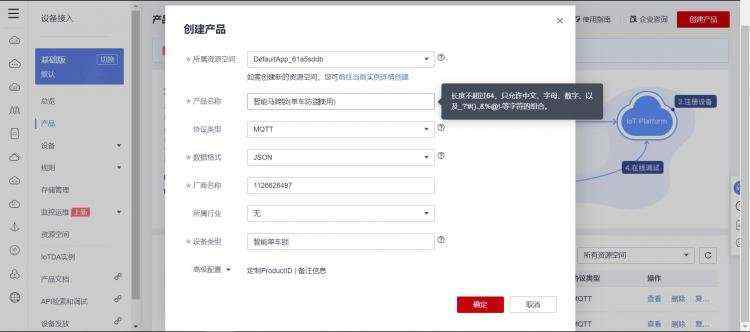








设备创建成功:
"device_id": "6274b1d62d5e854503d3a67e_lock",
"secret": "12345678"
创建完产品、设备之后,接下来就需要知道如何通过MQTT协议登陆华为云服务器。
官方的详细介绍在这里:
https://support.huaweicloud.com/devg-iothub/iot_01_2127.html#ZH-CN_TOPIC_0240834853__zh-cn_topic_0251997880_li365284516112
属性上报格式:
https://support.huaweicloud.com/api-iothub/iot_06_v5_3010.html


MQTT设备登陆密匙生成地址:

DeviceId 6274b1d62d5e854503d3a67e_lock
DeviceSecret 12345678
ClientId 6274b1d62d5e854503d3a67e_lock_0_0_2022050605
Username 6274b1d62d5e854503d3a67e_lock
Password 334dd7c0c10e47280880e9dd004ae0d8c5abc24dbbc9daa735315722707fe13b
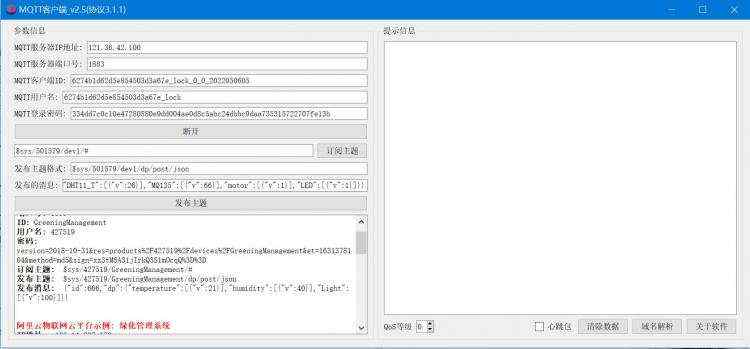
所有的参数已经得到,接下来采用MQTT客户端登录华为云进行测试。
华为云物联网平台的域名是: 161a58a78.iot-mqtts.cn-north-4.myhuaweicloud.com
华为云物联网平台的IP地址是:121.36.42.100
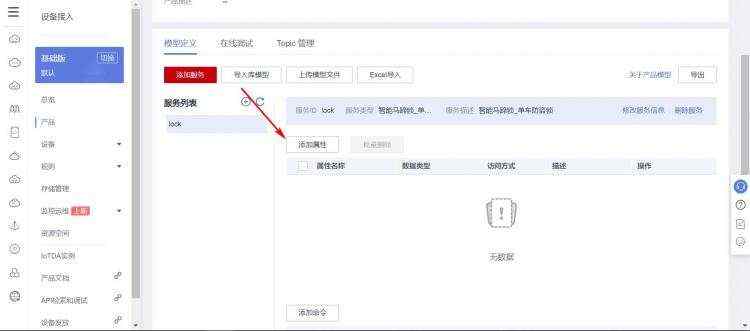
在软件里参数填充正确之后,就看到设备已经连接成功了。
接下来打开设备页面,可以看到设备已经在线了。

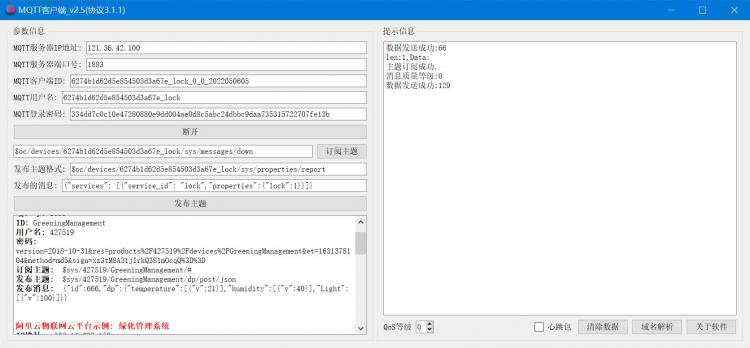
//订阅主题: 平台下发消息给设备
$oc/devices/6274b1d62d5e854503d3a67e_lock/sys/messages/down
//设备上报数据
$oc/devices/6274b1d62d5e854503d3a67e_lock/sys/properties/report
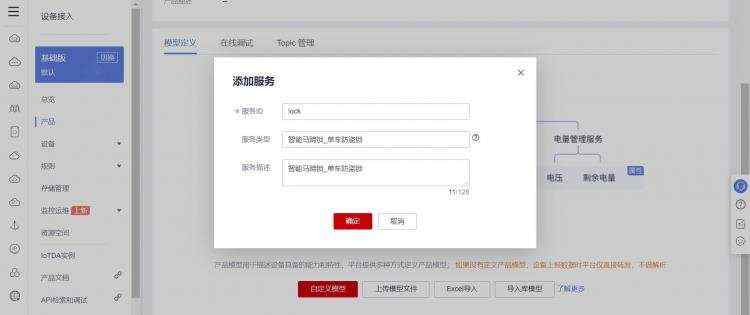
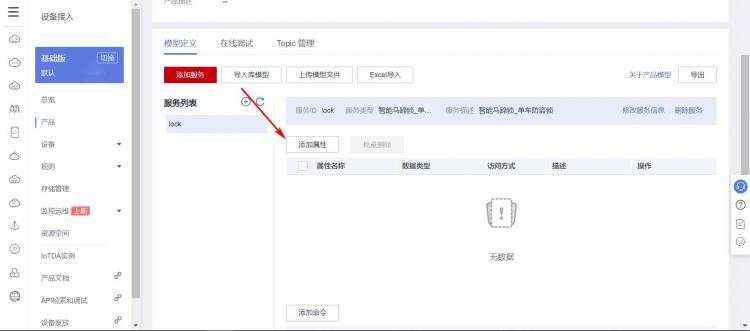
//上报的属性消息 (一次可以上报多个属性,在json里增加就行了)
"services": ["service_id": "lock","properties":"lock":1]


//订阅主题: 平台下发消息给设备
$oc/devices/6274b1d62d5e854503d3a67e_lock/sys/messages/down
//设备上报数据
$oc/devices/6274b1d62d5e854503d3a67e_lock/sys/properties/report
//上报的属性消息 (一次可以上报多个属性,在json里增加就行了)
"services": ["service_id": "lock","properties":"GPS信息":"lat:12.345,lng:45.678"]
为了更方便的展示设备数据,与设备完成交互,还需要开发一个配套的上位机,官方提供了应用侧开发的API接口、SDK接口,为了方便通用一点,我这里采用了API接口完成数据交互,上位机软件采用QT开发。
帮助文档地址: ttps://support.huaweicloud.com/api-iothub/iot_06_v5_0034.html
设备属性就是设备上传的传感器状态数据信息,应用侧提供了API接口,可以主动向设备端下发请求指令;设备端收到指令之后需要按照约定的数据格式上报数据;所以,要实现应用层与设备端的数据交互,需要应用层与设备端配合才能完成。


STM32连接华为云IOT的工程代码Get: https://download.csdn.net/download/xiaolong1126626497/81993720
#include "app.h"
/*
函数功能: 各种硬初始化
继电器模块--DAT--->PA4
PB12-----输入引脚,检测模块是否连接或者断开
*/
void Hardware_Init(void)
RCC->APB2ENR|&#61;1<<2;
GPIOA->CRL&&#61;0xFFF0FFFF;
GPIOA->CRL|&#61;0x00030000;
RCC->APB2ENR|&#61;1<<3;
GPIOB->CRH&&#61;0xFFF0FFFF;
GPIOB->CRH|&#61;0x00080000;
//
//初始化ADXL345.
//返回值:0,初始化成功;1,初始化失败.
u8 ADXL345_Init(void)
IIC_Init(); //初始化IIC总线
if(ADXL345_RD_Reg(DEVICE_ID)&#61;&#61;0XE5) //读取器件ID
ADXL345_WR_Reg(DATA_FORMAT,0X2B); //低电平中断输出,13位全分辨率,输出数据右对齐,16g量程
ADXL345_WR_Reg(BW_RATE,0x0A); //数据输出速度为100Hz
ADXL345_WR_Reg(POWER_CTL,0x28); //链接使能,测量模式
ADXL345_WR_Reg(INT_ENABLE,0x00); //不使用中断
ADXL345_WR_Reg(OFSX,0x00);
ADXL345_WR_Reg(OFSY,0x00);
ADXL345_WR_Reg(OFSZ,0x00);
return 0;
return 1;
//写ADXL345寄存器
//addr:寄存器地址
//val:要写入的值
//返回值:无
void ADXL345_WR_Reg(u8 addr,u8 val)
IIC_Start();
IIC_Send_Byte(ADXL_WRITE); //发送写器件指令
IIC_Wait_Ack();
IIC_Send_Byte(addr); //发送寄存器地址
IIC_Wait_Ack();
IIC_Send_Byte(val); //发送值
IIC_Wait_Ack();
IIC_Stop(); //产生一个停止条件
//读ADXL345寄存器
//addr:寄存器地址
//返回值:读到的值
u8 ADXL345_RD_Reg(u8 addr)
u8 temp&#61;0;
IIC_Start();
IIC_Send_Byte(ADXL_WRITE); //发送写器件指令
temp&#61;IIC_Wait_Ack();
IIC_Send_Byte(addr); //发送寄存器地址
temp&#61;IIC_Wait_Ack();
IIC_Start(); //重新启动
IIC_Send_Byte(ADXL_READ); //发送读器件指令
temp&#61;IIC_Wait_Ack();
temp&#61;IIC_Read_Byte(0); //读取一个字节,不继续再读,发送NAK
IIC_Stop(); //产生一个停止条件
return temp; //返回读到的值
//读取ADXL的平均值
//x,y,z:读取10次后取平均值
void ADXL345_RD_Avval(short *x,short *y,short *z)
short tx&#61;0,ty&#61;0,tz&#61;0;
u8 i;
for(i&#61;0;i<10;i&#43;&#43;)
ADXL345_RD_XYZ(x,y,z);
delay_ms(10);
tx&#43;&#61;(short)*x;
ty&#43;&#61;(short)*y;
tz&#43;&#61;(short)*z;
*x&#61;tx/10;
*y&#61;ty/10;
*z&#61;tz/10;
//自动校准
//xval,yval,zval:x,y,z轴的校准值
void ADXL345_AUTO_Adjust(char *xval,char *yval,char *zval)
short tx,ty,tz;
u8 i;
short offx&#61;0,offy&#61;0,offz&#61;0;
ADXL345_WR_Reg(POWER_CTL,0x00); //先进入休眠模式.
delay_ms(100);
ADXL345_WR_Reg(DATA_FORMAT,0X2B); //低电平中断输出,13位全分辨率,输出数据右对齐,16g量程
ADXL345_WR_Reg(BW_RATE,0x0A); //数据输出速度为100Hz
ADXL345_WR_Reg(POWER_CTL,0x28); //链接使能,测量模式
ADXL345_WR_Reg(INT_ENABLE,0x00); //不使用中断
ADXL345_WR_Reg(OFSX,0x00);
ADXL345_WR_Reg(OFSY,0x00);
ADXL345_WR_Reg(OFSZ,0x00);
delay_ms(12);
for(i&#61;0;i<10;i&#43;&#43;)
ADXL345_RD_Avval(&tx,&ty,&tz);
offx&#43;&#61;tx;
offy&#43;&#61;ty;
offz&#43;&#61;tz;
offx/&#61;10;
offy/&#61;10;
offz/&#61;10;
*xval&#61;-offx/4;
*yval&#61;-offy/4;
*zval&#61;-(offz-256)/4;
ADXL345_WR_Reg(OFSX,*xval);
ADXL345_WR_Reg(OFSY,*yval);
ADXL345_WR_Reg(OFSZ,*zval);
//读取3个轴的数据
//x,y,z:读取到的数据
void ADXL345_RD_XYZ(short *x,short *y,short *z)
u8 buf[6];
u8 i;
IIC_Start();
IIC_Send_Byte(ADXL_WRITE); //发送写器件指令
IIC_Wait_Ack();
IIC_Send_Byte(0x32); //发送寄存器地址(数据缓存的起始地址为0X32)
IIC_Wait_Ack();
IIC_Start(); //重新启动
IIC_Send_Byte(ADXL_READ); //发送读器件指令
IIC_Wait_Ack();
for(i&#61;0;i<6;i&#43;&#43;)
if(i&#61;&#61;5)buf[i]&#61;IIC_Read_Byte(0);//读取一个字节,不继续再读,发送NACK
else buf[i]&#61;IIC_Read_Byte(1); //读取一个字节,继续读,发送ACK
IIC_Stop(); //产生一个停止条件
*x&#61;(short)(((u16)buf[1]<<8)&#43;buf[0]);
*y&#61;(short)(((u16)buf[3]<<8)&#43;buf[2]);
*z&#61;(short)(((u16)buf[5]<<8)&#43;buf[4]);
//读取ADXL345的数据times次,再取平均
//x,y,z:读到的数据
//times:读取多少次
void ADXL345_Read_Average(short *x,short *y,short *z,u8 times)
u8 i;
short tx,ty,tz;
*x&#61;0;
*y&#61;0;
*z&#61;0;
if(times)//读取次数不为0
for(i&#61;0;i<times;i&#43;&#43;)//连续读取times次
ADXL345_RD_XYZ(&tx,&ty,&tz);
*x&#43;&#61;tx;
*y&#43;&#61;ty;
*z&#43;&#61;tz;
delay_ms(5);
*x/&#61;times;
*y/&#61;times;
*z/&#61;times;
//得到角度
//x,y,z:x,y,z方向的重力加速度分量(不需要单位,直接数值即可)
//dir:要获得的角度.0,与Z轴的角度;1,与X轴的角度;2,与Y轴的角度.
//返回值:角度值.单位0.1°.
short ADXL345_Get_Angle(float x,float y,float z,u8 dir)
float temp;
float res&#61;0;
switch(dir)
case 0://与自然Z轴的角度
temp&#61;sqrt((x*x&#43;y*y))/z;
res&#61;atan(temp);
break;
case 1://与自然X轴的角度
temp&#61;x/sqrt((y*y&#43;z*z));
res&#61;atan(temp);
break;
case 2://与自然Y轴的角度
temp&#61;y/sqrt((x*x&#43;z*z));
res&#61;atan(temp);
break;
return res*1800/3.14;
//初始化IIC
void IIC_Init(void)
RCC->APB2ENR|&#61;1<<3; //先使能外设IO PORTB时钟
GPIOB->CRL&&#61;0X00FFFFFF; //6/7 推挽输出
GPIOB->CRL|&#61;0X33000000;
GPIOB->ODR|&#61;3<<6; //6,7 输出高
//产生IIC起始信号
void IIC_Start(void)
SDA_OUT(); //sda线输出
IIC_SDA&#61;1;
IIC_SCL&#61;1;
delay_us(4);
IIC_SDA&#61;0;//START:when CLK is high,DATA change form high to low
delay_us(4);
IIC_SCL&#61;0;//钳住I2C总线&#xff0c;准备发送或接收数据
//产生IIC停止信号
void IIC_Stop(void)
SDA_OUT();//sda线输出
IIC_SCL&#61;0;
IIC_SDA&#61;0;//STOP:when CLK is high DATA change form low to high
delay_us(4);
IIC_SCL&#61;1;
IIC_SDA&#61;1;//发送I2C总线结束信号
delay_us(4);
//等待应答信号到来
//返回值&#xff1a;1&#xff0c;接收应答失败
// 0&#xff0c;接收应答成功
u8 IIC_Wait_Ack(void)
u8 ucErrTime&#61;0;
SDA_IN(); //SDA设置为输入
IIC_SDA&#61;1;delay_us(1);
IIC_SCL&#61;1;delay_us(1);
while(READ_SDA)
ucErrTime&#43;&#43;;
if(ucErrTime>250)
IIC_Stop();
return 1;
IIC_SCL&#61;0;//时钟输出0
return 0;
//产生ACK应答
void IIC_Ack(void)
IIC_SCL&#61;0;
SDA_OUT();
IIC_SDA&#61;0;
delay_us(2);
IIC_SCL&#61;1;
delay_us(2);
IIC_SCL&#61;0;
//不产生ACK应答
void IIC_NAck(void)
IIC_SCL&#61;0;
SDA_OUT();
IIC_SDA&#61;1;
delay_us(2);
IIC_SCL&#61;1;
delay_us(2);
IIC_SCL&#61;0;
//IIC发送一个字节
//返回从机有无应答
//1&#xff0c;有应答
//0&#xff0c;无应答
void IIC_Send_Byte(u8 txd)
u8 t;
SDA_OUT();
IIC_SCL&#61;0;//拉低时钟开始数据传输
for(t&#61;0;t<8;t&#43;&#43;)
IIC_SDA&#61;(txd&0x80)>>7;
txd<<&#61;1
var cpro_id = "u6885494";


 京公网安备 11010802041100号 | 京ICP备19059560号-4 | PHP1.CN 第一PHP社区 版权所有
京公网安备 11010802041100号 | 京ICP备19059560号-4 | PHP1.CN 第一PHP社区 版权所有 